

- 868.00 KB
- 2022-04-29 14:34:09 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'自动控制系统课程设计双闭环直流控制系统指导老师:朱艺峰专业班级:自动化10-08班成员:
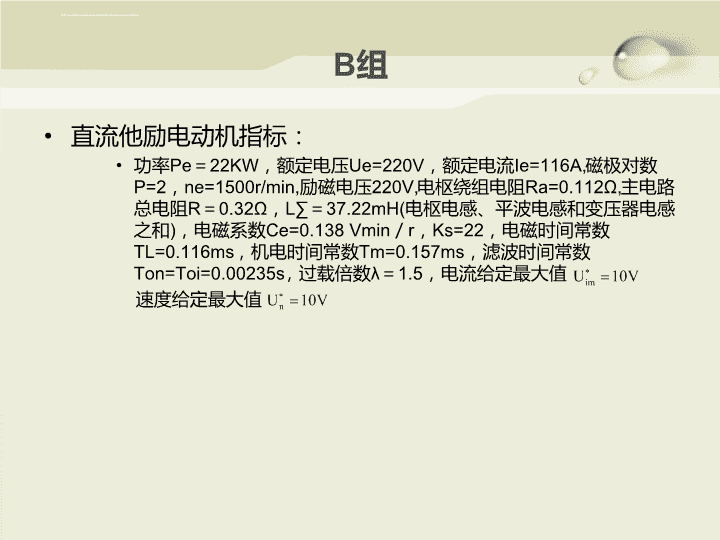
B组直流他励电动机指标:功率Pe=22KW,额定电压Ue=220V,额定电流Ie=116A,磁极对数P=2,ne=1500r/min,励磁电压220V,电枢绕组电阻Ra=0.112Ω,主电路总电阻R=0.32Ω,L∑=37.22mH(电枢电感、平波电感和变压器电感之和),电磁系数Ce=0.138Vmin/r,Ks=22,电磁时间常数TL=0.116ms,机电时间常数Tm=0.157ms,滤波时间常数Ton=Toi=0.00235s,过载倍数λ=1.5,电流给定最大值速度给定最大值
课程设计主要任务直流拖动控制系统总体设计1变流器主电路和保护环节设计2调速系统控制单元的确定和调整3调节器工程设计及参数计算4仿真校验5
1.1主电路确定一般整流器功率在4KW以下采用单向整流电路,4KW以上采用三相整流。电动机功率22KW,因此电路励磁绕组采用三相全控桥式整流电路,整流电源从主变压器二次侧a、b、c端引入。1.2拖动方案的确定单闭环调速系统中,调节器参数调整较为困难,系统动态性能不够好,且环内的任何扰动只能等到转速出现偏差时才能进行调节,转速动态降落大,为了更好的满足系统对动静态性能的要求,获得近似理想的过渡过程,并综合考虑经济性能指标,设计中选用转速、电流双闭环调速系统。1.直流拖动控制系统总体设计
+TGnASRACRU*n+-UnUiU*i+-UcTAM+-UdIdUPE-MTG转速、电流双闭环直流调速系统结构ASR—转速调节器ACR—电流调节器TG—测速发电机TA—电流互感器UPE—电力电子变换器内环外环-速度环ni直流调速系统结构
2.1整流变压器的设计2.1.1变压器二次侧相电压U2为经计算U2=109.8V,取U2=110V变压器变比K=U1/U2=2/1
2.1.2二次侧相电流I2和一次侧相电流I1二次侧相电流I2=Id/1.22=95A一次侧相电流I1=I2/k=95/2=48A2.1.3变压器容量计算二次容量S2=m2*U2*I2=3*110*95=31350VA一次容量S1=m1*U1*I1=3*220*48=31680VA平均计算容量S=0.5*(S1+S2)=31515VA设计时留取一定的裕量,可以取容量为50KVA的整流变压器。2.1整流变压器的设计
整流变压器接成Dy-11型,可以有效抑制整流时三次谐波对电网的不良影响。由于同步电压还要经过阻容滤波电路,会造成相位滞后(约30度),因此采用Yy-10的联接方式。整流变压器和同步变压器的连接方式
2.2.1整流元件的额定电压2.2.2整流元件的额定电流2.2.3GTR的选择故选取型号:KP300-KL24螺栓型普通晶闸管2.2晶闸管整流元件的选择
2.3.1过电压保护采用压敏电阻保护2.3主电路保护环节的设计
压敏电阻选取额定电压计算电网电压升高系数一般,取根据计算结果选取2.3主电路保护环节的设计
2.3.2元件换相保护在晶闸管两端并联RC阻容吸收电路,阻容参数按表3-4选取,电容的耐压一般选取晶闸管实际承受最大电压的1.1~1.5倍。电阻功率的选择:计算得:2.3主电路保护环节的设计
2.3.3过电流保护快速熔断器保护熔体的额定电流选取:选取2.3主电路保护环节的设计
2.3.4电抗器参数计算与选择作用:保证电流的连续当负载电流较小,会出现电流断续的现象,使电机的机械特性变软,影响系统的静态特性。临界电抗量晶闸管相电压有效值U2=110V最小负载电流平均值Idmin=5%Ide=58A得:Lcr=1.314mH2.3主电路保护环节的设计
限制输出电流脉动电感量为了使系统能正常运行,提高运行的可靠性,在主电路中与负载串联电抗器其中电感量:2.3主电路保护环节的设计
由表3-5可查Si为电流脉动系数,三相整流Si<0.05,取Si=0.03代入数据得为了准确设计电抗器,计算时所得应该扣除2.3主电路保护环节的设计
折算到变压器二次侧的每相漏电感量为与整流电路形式有关的系数由表3-5为3.9电动机电枢电感量为2.3主电路保护环节的设计
满足设计要求的平波电抗器计算得2.3主电路保护环节的设计
3.1检测环节3.1.1电流检测电流反馈环节的输入信号是主电路的电流量,经变换后获得输出为直流电压的反馈量Ui.选用两级交流电流互感器的连接,标准互感器后再加一级互感器。交流互感器一次侧电流应根据整流装置输出最大电流来选择。3.调速系统控制单元的确定和调整
3.1.2转速检测选用测速发电机和电位器构成转速检测装置:3.1检测环节测速发电机转速与电动机转速相匹配,采用同轴相连的方法进行连接,设计中选用型号为ZSY231/110其功率略大于电动机的功率,电位器则选用2.2K。
采用PI调节器调节器的限幅采用10V稳压管内限幅3.2调节器的限幅与锁零
对锁零电路的要求:(1)系统处于停车状态时,具有积分作用的调节器,必须用锁零电路将其输出电位锁到零电位上.(2)系统接到起、停及反向指令时,或处于正常运行状态时,调节器不能锁零。(3)只有当时,才允许锁零电路的输出信号对调节器实现锁零。3.2调节器的限幅与锁零
三相晶闸管集成触发电路:3.3触发电路的确定
该电路核心部分是三块集成触发电路N1、N2、N3构成的电路,它们是TCA785集成电路。一块TCA785集成触发电路可以同时发两个相位互差180度的脉冲,若需要六路相位互差60度的脉冲需要三块TCA785。同步电压经过高阻值的电阻后,送到其内部电源零点鉴别器,然后送往同步寄存器寄存,同步寄存器中零点寄存信号控制锯齿波发生器,9管脚连接的电位器用来调节三相锯齿波斜率,并和控制电压结合定触发脉冲初相位。当电容两端锯齿波电压大于移相控制电压即11管脚电压时便产生一个脉冲电压送到输出逻辑单元.控制电压经过限流电阻送到TCA785的11管脚,决定相位角的大小.当控制电压下降时相位角前移变小,相应有当控制电压上升时,相位角后移变大。3.3触发电路的确定
集成芯片CD4011的作用是将N1、N2、N3的14、15脚输出的脉冲斩成脉冲列。KC41C的作用是对N1、N2、N3的14、15脚输出的脉冲再产生一个补脉冲。KC41C输出的触发脉冲,经过功率放大,再经脉冲变压器,送往主电路的VT1--VT6六个晶闸管。TCA785接在同步变压器的二次侧。为了让变流器正确工作,同步电压的相位极其重要,因为三相桥式全控变流各元件的同步电压应按顺序滞后60度。所以同步变压器接线方式为Yy10。3.3触发电路的确定
4.1电流调节器设计4.1.1电流调节器的选择电流环的作用就是保持点数电流在动态过程中不超过允许值,因而在突加控制作用时不希望有超调,故采用典型Ⅰ型系统设计电流环。传递函数4.调节器工程设计及参数计算
系统稳态结构框图双闭环直流调速系统的稳态结构框图—转速反馈系数—电流反馈系数Ks1/CeU*nUcIdEnUd0Un++-ASR+U*i-IdRRACR-UiUPE
4.1电流调节器设计4.1.2电流调节器参数计算为了让调节器的零点对消掉控制对象的大时间常数极点,选择电流调节器的比例系数电流滤波时间常数取则按照上述参数,电流环可以达到的指标为:满足设计要求。
4.2转速调节器设计4.2转速调节器设计及参数计算在设计转速调节器时,可把已经设计好的电流环看作是转速调节系统的一个环节,其等效传递函数整个转速调节系统的动态结构图如右图a。把滤波等效地移到环内,给定信号改为再把时间常数为和的两个小惯性环节合并,近似成时间常数为的惯性环节,则转速环节结构图简化为右图b。转速环结构图最终简化成右图c。
4.2转速调节器设计及参数计算由上图b可以明显看出,要把转速校正成典型Ⅱ型系统,ASR也应该采用PI调节器,其具体电路图如右图所示,其传递函数为式中——转速调节器的比例系数——转速调节器的超前时间常数
4.2转速调节器设计及参数计算转速调节器的参数包括和按照典型Ⅱ型系统的参数选择方法,选择转速调节器比例系数电流滤波时间常数式中取
校验转速超调量当h=5时,而n的变量=116*0.32/0.138=269r/min,因此超调量=0.821*2*1.5*269/1500*0.0105/0.157=2.9%<10%,能满足设计要求。
利用传递函数建立仿真模型5.仿真校验
转速与ACR输出的电流波形如图。开始是没有加入扰动,n快速从0到达最大值1532rad/min,时间为0.75s,稳定值是在1500rad/min。经过计算超调量为2.13%。在t=2时加入扰动。N减小,但在双闭环的调节下有快速达到稳定值。而电流是快速达到最大值。一段时间后有快速减小。出现负值。待转速达到最大值后,电流变为0。再加入扰动后,电流变为40A。仿真结果
ThankYou!'
您可能关注的文档
- 园林设计毕业答辩PPT1_____分享了课件.ppt
- 复古毕业设计答辩PPT模板课件.ppt
- 小雏菊清新毕业答辩PPT模板课件.ppt
- 应届毕业生答辩PPT模板课件.ppt
- 有线电视、病房呼叫系统方案及智能化设计 答辩PPT 建筑电气与智能化专业课件.ppt
- 河北科技大学毕业答辩PPT标准模板课件.ppt
- 答辩PPT 条干均匀度测试系统的数据采集、处理与显示课件.ppt
- 简约毕业答辩PPT模板课件.ppt
- 精-适合女生的毕业答辩PPT模板课件.ppt
- 课题设计答辩PPT模板,PLC液体混合控制系统课件.ppt
- 2019年申报高级职称答辩PPT演示材料说明.ppt
- 兰州交通大学本科答辩PPT.ppt
- GSM网络优化答辩PPT.ppt
- 冲压模具毕设答辩PPT.ppt
- 小清新毕业答辩PPT模板课件.ppt
- 华中农业大学论文答辩PPT模板.ppt
- 博士论文答辩PPT.ppt
- 基于AT89S52单片机直流电机PWM控制系统_-毕业论文答辩PPT.ppt