

- 1.59 MB
- 2022-04-29 14:30:50 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'数字信号处理第章(、)
自适应滤波器的特点是:滤波器的参数可以自动地按照某种准则调整到最佳滤波;实现时不需要任何关于信号和噪声的先验统计知识,尤其当输入统计特性变化时,自适应滤波器都能调整自身的参数来满足最佳滤波的需要。常常将这种输入统计特性未知,调整自身的参数到最佳的过程称为“学习过程”。将输入信号统计特性变化时,调整自身的参数到最佳的过程称为“跟踪过程”,因此自适应滤波器具有学习和跟踪的性能。由于自适应滤波器有这些特点,自1967年威德诺(B.Widrow)等人提出自适应滤波器以来,在短短十几年中,自适应滤波器发展很快,已广泛地用于系统模型识别,通信信道的自适应均衡,雷达与声纳的波束形成,减少或消除心电图中的周期干扰,噪声中信号的检测、跟踪、增强和线性预测等。
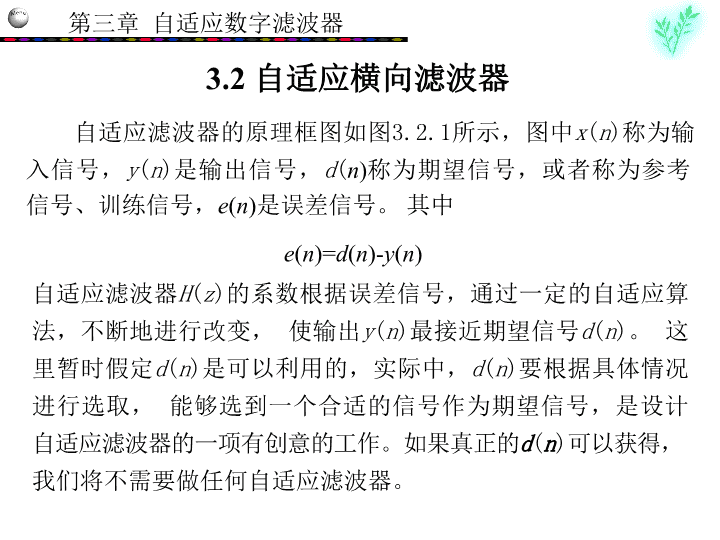
3.2自适应横向滤波器自适应滤波器的原理框图如图3.2.1所示,图中x(n)称为输入信号,y(n)是输出信号,d(n)称为期望信号,或者称为参考信号、训练信号,e(n)是误差信号。其中e(n)=d(n)-y(n)自适应滤波器H(z)的系数根据误差信号,通过一定的自适应算法,不断地进行改变,使输出y(n)最接近期望信号d(n)。这里暂时假定d(n)是可以利用的,实际中,d(n)要根据具体情况进行选取,能够选到一个合适的信号作为期望信号,是设计自适应滤波器的一项有创意的工作。如果真正的d(n)可以获得,我们将不需要做任何自适应滤波器。
图3.2.3自适应FIR滤波器
这里w(n)称为滤波器单位脉冲响应,令:i=m+1,wi=w(i-1),xi=x(n-i+1),n用j表示,上式可以写成(3.2.2)这里wi也称为滤波器加权系数。用上面公式表示其输出,适合于自适应线性组合器,也适合于FIR滤波器。将上式表示成矩阵形式:(3.2.3)式中误差信号表示为(3.2.4)
2.利用均方误差最小准则求最佳权系数和最小均方误差误差信号被用来作为权系数的控制信号。下面采用均方误差最小的准则,求最佳权系数。由(3.2.4)式,均方误差为(3.2.5)令(3.2.6)(3.2.7)
将(3.2.6)、(3.2.7)式代入(3.2.5)式,得到(3.2.8)Rdx称为dj与Xj的互相关矩阵,是一个N维列矩阵;Rxx是输入信号的自相关矩阵,特点如下:(1)是对称矩阵,即;(2)是正定或半正定的,因为对于任意矢量V满足下式:自相关矩阵的主对角线是输入信号的均方值,交叉项是输入信号的自相关值。
(3.2.8)式表明,当输入信号和期望信号是平稳随机信号时,均方误差信号E[e2j]是权系数的二次函数,即将(3.2.8)式展开时,公式中的权系数均以它的一次幂或二次幂出现。如果只有一个权系数w1,则E[e2j]是w1的口向上的抛物线;如果有两个权系数w1w2,则E[ej2]是它们的口向上的抛物面;对于两个权系数以上的情况,则属于超抛物面性质。E[ej2]在自适应信号处理中是一个重要的函数,经常称它为性能函数。为选择权系数,使性能函数到达它的最小点,一些有用的自适应方法都是基于梯度法的,我们用表示E[ej2]的梯度向量,它是用E[ej2]对每个权系数求微分而形成的一个列向量,用公式表示如下:
(3.2.9)按照(3.2.4)式,梯度推导如下:(3.2.10)还可以用(3.2.8)式对W求导得到(3.2.11)令上式等于0,得到最佳权矢量W*的表达式:(3.2.12)
对比第二章维纳滤波器的最佳解,结果是一样的。上式也称为维纳权矢量。当自适应滤波器的权系数满足上式时,均方误差将取最小值。将(3.2.12)式代入(3.2.8)式得到最小均方误差:(3.2.13)或者将上式取转置,用下式表示:(3.2.14)我们知道,在维纳滤波器中,当滤波器的单位脉冲响应取最佳值时,其误差信号和输入信号是正交的;这里也有相同的结果,当权矢量取最佳值时,梯度为0,按照(3.2.10)式:
例3.2.1一个单输入的二维权矢量自适应滤波器如图3.2.4所示,图中输入信号与期望信号分别为这两个信号都是周期性确定性信号,因为任何正弦函数积的期望值,都可由这个积在一个或多个周期上作时间平均来计算,可以推导出下面公式[6]:图3.2.4两个权的自适应滤波器
上式表明性能函数E[ej2]对权函数是二次型的,用(3.2.11)式求梯度向量,得到求最佳权矢量可以用(3.2.12)式,通过对Rxx求逆得到,也可以通过上式,令,而求出:
用(3.2.13)式求最小均方误差:上式说明只要N>2,不管N取多少,通过对权系数的调整可使均方误差达到0,此时输出信号yj完全等于期望信号dj,例如N=2,按照上面公式,可以求出输入、输出信号以及最佳权系数如下:
3.2.2性能函数表示式及其几何意义在自适应滤波器的分析研究中,性能函数是一个重要函数,前面已推导出性能函数用(3.2.8)式表示,重写如下:下面我们推导它的其它表示方法以及几何意义。均方误差是权系数的二次函数,当权系数取最佳值时,均方误差取最小值,将(3.2.14)式代入(3.2.8)式,可以用最小均方误差表示性能函数,推导如下:为了表示方便,令ζ=E[e2j],则
将(3.2.12)式代入上式,得到(3.2.15)令V=W-W*=[v1,v2,…,vN]T(3.2.16)V称为偏差权向量,它表示权向量对最佳权向量的偏差。这样性能函数可以表示得更简单:(3.2.17)
因为Rxx是对称的,正定或半正定的,利用它的特征值和特征向量再进一步简化,假设Rxx是N×N维,它的N个特征值为:λ1,λ2,…,λN,将Rxx进行分解,得到Rxx=QTΛQ,Λ=QTRxxQ(3.2.18)通过调节使Q归一化,即(3.2.19)(3.2.20)
式中,Q称为正交矩阵或特征矩阵,qi称为特征向量,满足下式:(3.2.21)(3.2.22)Λ是由特征值组成的对角矩阵,用下式表示:(3.2.23)将(3.2.18)式代入(3.2.17)式,得到令(3.2.24)
则(3.2.25)上式将性能函数变成了平方和的形式。再观察(3.2.24)式,该式将V坐标中的Rxx的特征向量变成了V′坐标中的单位向量。利用(3.2.24)式将特征向量qi变成qi′,再利用(3.2.20)、(3.2.21)式,可得(3.2.26)
也就是说,qi′为V′坐标中的第i个单位向量,qi′亦是Λ矩阵对应于λi的特征向量。下面用二维权矢量的情况说明它的几何意义。对于二维权矢量情况,有下面公式:
图3.2.5二维权矢量性能表面
图3.2.6等均方误差的椭圆曲线族
按照(3.2.17)式,有或当c=ζmin时,对应椭圆的中心,V=W-W*,则相当于W坐标平移到V坐标的原点,即V坐标的原点对应W坐标的最佳点W*。这里,v1v2不是椭圆的主轴。但经过对Rxx的分解:且V′=QTV将性能函数的椭圆族(按照(3.2.25)式)变成
即或者(3.2.27)显然,上式是一个椭圆方程,v1′和v2′是椭圆族的主轴,如果λ1<λ2,则v1′是长轴,v2′是短轴。因此(3.2.24)式起坐标旋转的作用,将v1v2旋转到主轴上,形成v1′v2′主轴。对于维数N>2的情况,长轴对应最小特征值,按照上面的椭圆方程长轴正比于;短轴对应于最大特征值,正比于。另外,因为
得到(3.2.28)V′中单位矢量就是V坐标中的Rxx的特征矢量。
3.2.3最陡下降法1.最陡下降法的递推公式将(3.2.11)式代入(3.2.29)式,得到(3.2.30)(3.2.31)在上式两边都减去W*,并令Vj=Wj-W*,得到Vj+1=[I-2μRxx]Vj(3.2.32)上式是一个递推公式,由于[·]项不是对角矩阵,计算与分析均复杂。下面仍然采用坐标旋转的方法进行推导。
(3.2.33)此时,[·]项已变成对角矩阵,假设起始值是V0′,可得到上式的递推解为(3.2.34)
再将(3.2.24)式代入,再经过坐标平移,即代入Vj=Wj-W*式,最后得到权系数的递推公式:(3.2.35)上面递推公式中,[·]部分已变成对角矩阵,这使分析与研究自适应特性变得简单了。
2.收敛条件由最陡下降法的递推公式不难分析出它的收敛条件,即当迭代次数j趋于∞时,权系数收敛最佳时的条件。按照上式,显然只有当(3.2.36)(3.2.37)满足时,才能得到:。(3.2.37)式即是最陡下降法的收敛条件,式中λmax是Rxx的最大特征值。(3.2.36)式中的0表示0矢量。
3.过渡过程过渡过程是指权矢量和性能函数由起始点随迭代次数的增加,进行变化的过程。下面从权矢量和性能函数两方面讨论自适应滤波器的过渡过程。权矢量的过渡过程讨论如下:按照(3.2.34)式,权矢量的递推解是第i个权系数递推方程是(3.2.38)令(3.2.39)
将上式代入(3.2.38)式,得到(3.2.40)上式说明第i个分量vi′按指数规律变化,其时常数为i=1,2,3,…,N(3.2.41)因为一般μ取得比较小,可以近似为i=1,2,3,…,N(3.2.42)
因为所以再将(3.2.40)式代入,得到(3.2.43)
(3.2.44)式中(3.2.45)上式说明第i个加权系数按照N个指数和的规律变化,由初始值收敛到最佳值,其时常数与特征值成反比。下面分析性能函数的过渡过程。按照(3.2.25)式,性能函数如下式:(3.2.46)将(3.2.40)式代入,得到(3.2.47)
上式说明性能函数也是按N个指数和的规律变化,和加权系数过渡过程不同的是时间常数不同,它的时常数为(3.2.48)我们已经知道,性能函数和各个加权系数都是按照N个具有不同时常数的指数和的规律变化的,时常数和特征值成反比,不同的特征值对应的收敛时间是不一样的,但最终的收敛要取决于最慢的指数过程,它的时常数最大,对应最小的特征值,公式如下:(3.2.49)(3.2.50)
但为保证收敛,μ不能取得太大,受限于最大特征值λmax。这样,如果特征值比较分散时,即λmax和λmin相差很大时,使最陡下降法的收敛性能很差。下面分析μ值的影响。μ值收敛过程影响很大,首先必须选择得足够小,使之满足收敛条件:但按照(3.2.47)、(3.2.48)式,它影响收敛速度。一般希望在保证收敛的条件下,选大一些,使时间常数小一些,收敛的速度快一些。但当μ选择得太大时,即使收敛条件满足,也可能形成振动性的过渡特性。在图3.2.7中,图(a)是μ较小时的情况;图(b)是μ较大时的情况,此时过渡过程已发生振荡。
图3.2.7值的影响(a)较小时的情况;(b)较大时的情况
3.2.4最小均方(LMS)算法1.LMS算法的权值计算]LMS(LeastMeanSquare)算法的梯度估计值用一条样本曲线进行计算,公式如下:(3.2.51)因为
所以(3.2.52)(3.2.53)FIR滤波器中的第i个权系数的计算公式为(3.2.54)FIR滤波器中的第i个权系数的控制电路如图3.2.8所示,LMS自适应滤波器的总框图如图3.2.9所示。
图3.2.8FIR第i个支路的控制电路
LMS算法的加权系数按照(3.2.53)式进行控制,式中加权矢量的改变量是2μejXj,梯度的估计值是-2ejXj。显然,这是一个随机变量,这说明LMS算法的加权矢量是随机变化的。因此,LMS算法又称为随机梯度法。下面对这种算法的性能进行分析,主要分析加权矢理和性能函数的平均变化规律以及它们的随机性造成的影响。按照(3.2.52)式,对梯度估计值求统计平均,得到(3.2.55)上式说明梯度估计值是无偏估计的,梯度的估计量在理想梯度▽j附近随机变化,权系数也是在理想情况下的权轨迹附近随机变化的。
图3.2.8LMS自适应滤波器总计算框图
2.LMS算法加权矢量的过渡过程将误差公式(3.2.4)式代入(3.2.53)式,得到(3.2.56)按照(3.2.53)式,对加权矢量取统计平均:(3.2.57)
类似于最陡下降法的推导,经过坐标平移和旋转,变换到V′坐标中。其公式推导如下:令Vj=Wj-W*(3.2.58)那么E[Vj]=E[Wj]-W*E[Vj+1]=E[Wj+1]-W*(3.2.59)将上面两式代入(3.2.57)式中,得到它的递推解是令Rxx=QΛQT,Λ=QRxxQT(3.2.60)
得到(3.2.61)(3.2.62)再将(3.2.59)、(3.2.60)和(3.2.61)式代入上式,得到E[Wj]=W*+Q[I-2μΛ]jQ-1(W0-W*)(3.2.63)对比(3.2.35)式,说明LMS算法加权矢量的统计平均值的过渡过程和最陡下降法加权矢量的过渡过程是一样的。换句话说,LMS算法加权矢量是在最陡下降法加权矢量附近随机变化的,其统计平均值等于最陡下降法加权矢量,那么,其收敛条件同样为(3.2.64)
在满足收敛条件的情况下,才有下式:由于最大的特征值λmax不可能大于R的迹(R的主对角线元素之和),即因此收敛条件可以表示为(3.2.65)
对于横向滤波器,式中的迹是NE[x2j],即N倍的输入功率,那么(3.2.66)实际中,通常μ选得很小,选(3.2.67)同样由(3.2.62)式,第i个分量为(3.2.68)
同样引入时常数τi,(3.2.69)(3.2.70)(3.2.71)同样,第i个权系数可以表示成(3.2.72)
3.LMS算法性能函数的过渡过程——学习过程由于LMS算法加权矢量的平均值的变化规律与最陡下降法的加权矢量一样,可以推想它的均方误差也会按照最陡下降的均方误差变化规律变化。下面进行推导。按照(3.2.4)式,信号误差为(3.2.73)
式中,eoptj=dj-XjTW*,称为最佳误差信号,它对应于最小均方误差,即按照(3.2.73)式写出均方误差表示式:假定Xj和Vj不相关,上式中最后一项为0,那么
同样,假设加权系数变化很小,Vj也变化很小,E[Vj]≈Vj,这样:类似前面的推导,得到(3.2.74)(3.2.75)对照最陡下降法性能曲线(3.2.47)式,LMS均方误差变化规律和最陡下降法完全一样,学习曲线同样近似为几个不同时间常数的指数和。
4.稳态误差和失调系数由上面分析知道,权矢量的平均值可以收敛到它的最佳值,但权矢量变化过程是随机的,即使其平均值收敛到最佳值,它仍然按照下式:Wj+1=Wj+2μejXj随机地进行变化,这样使权矢量仍在最佳值附近随机变化,但均方误差将大于最小均方误差,如图3.2.10所示。为此,引入失调系数M,M定义为(3.2.76)
图3.2.10LMS算法稳态误差
可以推出[5]失调系数为(3.2.77)或者M=μNPin(3.2.78)式中,N是滤波器的阶数,Pin是输入信号功率。上式说明μ和输入功率加大都会增加失调系数。在保证收敛的情况下μ加大,会提高收敛速度,也说明为了减小失调系数,应该适当选择收敛速度,以保证收敛速度和失调系数都满足要求。
图3.2.11是一个LMS自适应滤波器的计算机结果[5],阶数N=5,其输入是信号加白噪声,输入信号功率为1,中心频率是0.03fs(fs为采样频率),噪声功率为0.5,输入信号自相关函数的特征值为:5.14、0.853、0.502、0.500、0.500,权系数初始值取0,μ=0.0065。图中画出了一条样本学习曲线和150条样本学习曲线的平均曲线。该图表明个别学习曲线起伏较大,平均学习曲线起伏很小,计算出的维纳最小均方误差为0.74396,用LMS算法得到的稳态误差大于该值,按(3.2.77)式计算的失调系数是4.87%,按计算机模拟结果测得的失调系数是5.40%。
图3.2.11LMS算法的学习曲线
§3.1.2两直线平行与垂直的判定
1.体验和经历用斜率研究两条直线平行与垂直关系的过程与方法,初步体会数形结合思想。2.掌握两条直线平行与垂直的判定条件。3.会判断及证明两条直线是否平行或垂直,并会应用平行的判定条件解决三点共线问题。学习目标
例题讲解已知A(2,3),B(-4,0),P(-3,1),Q(-1,2),试判断直线BA与PQ的位置关系,并证明你的结论。OxyABPQ∥
已知四边形ABCD的四个顶点分别为A(0,0),B(2,-1),C(4,2),D(2,3),试判断四边形ABCD的形状,并给出证明。例题讲解OxyDCAB∥∥
设两条直线l1、l2的倾斜角分别为α1、α2(α1、α2≠90°).Oyl1xl2α1α2动画演示
已知A(-6,0),B(3,6),P(0,3)Q(6,-6),判断直线AB与PQ的位置关系。例题讲解
例题讲解已知A(5,-1),B(1,1),C(2,3)三点,试判断△ABC的形状。OxyACB
1.判断下列各对直线平行还是垂直(1)经过两点斜率为1的直线2.试确定的值,使过点(1)平行(2)垂直(2)经过两点课堂检测
小结平行:对于两条不重合的直线l1、l2,其斜率分别为k1、k2,有l1∥l2k1=k2垂直:如果两条直线l1、l2都有斜率,且分别为k1、k2,则有l1⊥l2k1k2=-1条件:不重合、都有斜率条件:都有斜率'
您可能关注的文档
- 最新教学策略与建议课件PPT.ppt
- 最新教学案例一用偏光显微镜研究液晶的相变及光学特性-武汉大学课件PPT.ppt
- 最新教学方法和技巧课件PPT.ppt
- 最新教师快闪含背景音乐课件PPT.ppt
- 最新教师培训PPT课件课件PPT.ppt
- 最新教育心理学第五章智力与创造力的培养课件PPT.ppt
- 最新数字万用表实训全解课件PPT.ppt
- 最新数字化医院全面解决方案课件PPT.ppt
- 最新数字化测图概述..课件PPT.ppt
- 最新数字信号处理[第六章-无限脉冲响应数字滤波器设计]课件PPT.ppt
- 最新数学必修五不等式复习课件PPT.ppt
- 最新数学广角-搭配(一)课件PPT.ppt
- 最新数学活动“口算比赛”宣传ppt课件PPT.ppt
- 最新数据库逻辑结构及物理设计课件PPT.ppt
- 最新数据库原理与技术课件PPT.ppt
- 最新数据结构课程设计15种.课件PPT.ppt
- 最新数理金融学第1章基本知识课件PPT课件.ppt
- 最新文化专题一文化的作用与发展课件PPT课件.ppt