

- 1010.00 KB
- 2022-04-29 14:45:04 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'PID控制原理和形式解析
3.1概述概念:系统偏差的比例(Proportional)、积分(Integral)和微分(Derivative)的综合控制,简称PID控制特点:算法简单、鲁棒性强和可靠性高发展:气动->电动->电子->数字2021/9/302
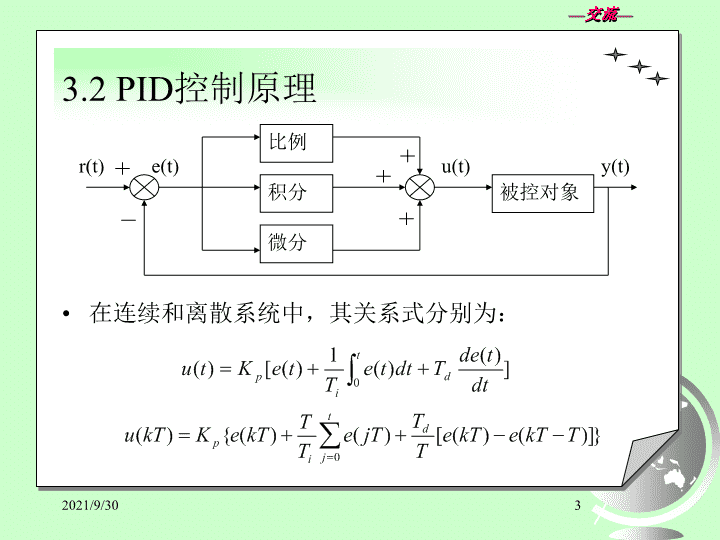
3.2PID控制原理在连续和离散系统中,其关系式分别为:比例积分微分被控对象r(t)e(t)u(t)y(t)2021/9/303
2.增量式控制算法优点:A)由于计算机输出是增量,所以误动作小B)手自动切换时冲击小,可实现无扰动切换C)算法不需要累加,控制增量只与第k次的采样值有关不足:积分截断效应大,有静态误差,溢出影响大等2021/9/307
3.控制算法的改进由于实际被控对象的复杂性,普通的PID控制算法通常很难满足控制要求,需要对PID控制算法进行改进,主要的改进算法有以下五种:1)积分分离PID控制算法2)遇限消弱积分PID控制算法3)不完全微分PID控制算法4)微分先行PID控制算法5)带死区的PID控制算法2021/9/308
1)积分分离PID控制算法在常规PID控制器中,积分环节的作用是为了消除静差,提高精度。但是在过程的启动、结束或大幅度增减变化设定值时,短时间内系统输出有很大偏差,会造成PID运算的积分积累,引起很大的超调,甚至引起震荡,这是生产过程不允许的。在常规控制算法中引入积分分离,既可以保持积分作用,又可以减小超调量,改善控制性能。在常规PID控制算法中,积分项乘一个系数,则位置式PID控制算法可写成如下积分分离形式:优点:当偏差较小时,采用PID控制,当偏差较大时,采用PD控制,可大幅度降低超调量2021/9/309
2)遇限消弱积分PID控制算法积分分离该PID控制算法中开始时不积分,而遇限消弱积分PID控制算法与之相反。控制算法的基本思路是:开始积分,而进入限制范围后停止积分。当控制进入饱和区以后,便不再进行积分项的累加,而只执行消弱积分的运算计算。在计算u(k)时,先判断u(k-1)是否超出限制值,若超出,则只累加负偏差;若未超出,则累加正偏差。该算法可避免长时间停留在饱和区。2021/9/3010
3)不完全微分PID控制算法在常规PID控制器中,微分环节的作用是改善系统的动态性能,但对于干扰特别敏感。当误差扰动突变时,微分项的输出仅在第一个周期起作用,对于时间常数较大的系统,其调节作用很小,不能起到超前控制误差的目的。另外,微分项的输出幅值一般比较大,过快的变化,对执行机构会造成不利的影响。解决办法之一是在算法中加一个一阶惯性环节(低通滤波器),构成不完全微分PID控制算法,其传递函数如下:该算法的优点是:不但能抑制高频干扰,而且克服了普通数字PID控制的缺点,数字调节器输出的微分作用能在各个周期里按照偏差变化的趋势,均匀地输出,真正起到了微分作用,改善了控制系统的性能。2021/9/3011
4)微分先行PID控制算法该算法先对输出量微分作用,其优点在于避免因提降给定值时所引起的超调量过大或阀值动作过分剧烈而产生振荡等,适用于给定值频繁提降的场合。1+TdsR(s)E(s)U(s)2021/9/3012
5)带死区的PID控制算法为了避免控制动作的过于频繁,消除由于动作频繁引起的振荡,可以采用带死区的PID控制算法。在算法中增加一个可调的死区参数,当偏差大于死区参数设定值时,控制器按照PID控制输出;而偏差小于等于死区参数设定值时,控制器不输出新的控制量,按原控制量输出。死区参数的具体数值可根据控制对象实际情况设定。2021/9/3013
4.PID控制算法的特点1)原理简单、结构简明、实现方便,能够满足大多数实际需要2)控制器适合于多种截然不同的对象,算法在结构上具有较强的鲁棒性2021/9/3014
(一)调节器的调节规律比例调节(P调节)比例积分调节(PI调节)比例微分调节(PD调节)比例积分微分调节(PID调节)3.4控制器参数对系统性能的影响2021/9/3015
(二)比例调节(P调节)⑴比例调节器的调节规律⑵比例调节器的静态偏差⑶比例调节器的特点2021/9/3016
⑴比例调节器的调节规律输出信号与输入信号成比例的调节器称为比例调节器,简称P调节器。其调节规律为:式中,——比例调节器的输出信号;——比例调节器的输入信号;——比例调节器的比例系数。2021/9/3017
⑴比例调节器的调节规律2021/9/3018
⑴比例调节器的调节规律比例度δ:δ与Kp成反比比例带的物理意义是:调节器输出值变化100%时,所需输人变化的百分数。2021/9/3019
⑴比例调节器的调节规律下图表示了比例带与调节器输入和输出的关系2021/9/3020
⑴比例调节器的调节规律【例题】浮球液位比例调节系统的液位调节示意图1.浮球2.调节阀3.杠杆4.阀杆5.连杆6.液泵2021/9/3021
⑴比例调节器的调节规律调节器输出与调节器的输入的关系式式中,——执行机构位移,即输出信号;——液位高度变化,即输入信号;——比例系数。比例系数按下式求得:2021/9/3022
⑴比例调节器的调节规律用比例带来表示比例调节器的调节作用,常以输入、输出的相对值表示。调节阀的位移变化相对值(%)为:式中,——调节阀的最大开启度;——调节阀的最小开启度;——调节阀的最大开启范围。2021/9/3023
⑴比例调节器的调节规律液位变化的相对值(%)为:式中,——液位标尺的最高刻度;——液位标尺的最低刻度;——调节器的最大控制范围。比例带的物理意义是:调节器输出值变化100%时,所需输人变化的百分数。2021/9/3024
控制器比例作用参数对系统性能的影响1)动态影响比例系数Kp加大,使系统的动作灵敏,速度加快,振荡次数增多,调节时间变长。当Kp太大时,系统会趋于不稳定。若Kp太小,又会使系统的响应动作变化缓慢。2)稳态影响加大比例系数Kp,在系统稳定的情况下,可以减小稳态误差,提高控制精度,却不能完全消除稳态误差。2021/9/3025
⑴比例调节器的调节规律比例带或比例系数对调节过程的影响:1—衰减振荡过程;2—等幅振荡过程;3—单调过程;4—无控2021/9/3026
⑴比例调节器的调节规律比例带或比例系数对调节过程的影响:2021/9/3027
⑵比例调节器的静态偏差当系统受到干扰作用后,在比例调节器的调节作用下,通过改变调节阀的开启度,使被控参数重新稳定在一个新稳态值上,被调参数的新稳定值与给定值之间的偏差就是比例调节器的静态偏差,亦称余差。静态偏差是不可避免的。比例带越宽,调节器放大倍数越小,灵敏度越低,调节过程较稳定,但调节过程的静态偏差较大;比例带越窄,调节器的放大倍数越大,灵敏度越高,调节过程的静态偏差越小,但系统的稳定性差。`2021/9/3028
⑶比例调节器的特点调节速度快,稳定性好,不易产生过调现象。但此种调节方式在调节结束后仍存在残余偏差,即调节参数不能回到原来的给定值上。一般地,比例调节器适用于系统干扰小,滞后也比较小,而时间常数不太小的对象调节系统中,而比例带的大致范围为:温度调节,20%~60%;压力调节,30%~70%;流量调节,40~80%较合适。如果调节对象的静态调节质量要求较高,则需采用其他调节性能更好的调节器。2021/9/3029
(三)比例积分调节(PI调节)⑴积分调节器的调节规律⑵比例积分调节器的调节规律⑶比例积分调节器的特点2021/9/3030
⑴积分调节器的调节规律①输出信号与输人信号成积分关系的调节器称为积分调节器,简称I调节器。其调节规律为:式中,——积分调节器的输出信号;——积分调节器的输入信号;——积分调节器的积分时间常数。2021/9/3031
⑴积分调节器的调节规律②积分调节的特点:积分调节的特点之一是无差调节。积分调节的另一个特点是在调节的过渡过程中没有比例调节稳定,也就是说单独采用积分调节器进行系统的调节时,不可能得到稳定的过渡过程。对于同一被控对象采用积分调节时,其调节过程的进程比采用比例调节时为慢,表现在振荡频率较低。2021/9/3032
⑴积分调节器的调节规律③积分速度对调节过程的影响:采用积分调节时,控制系统的开环增益与积分速度成正比。因此,增大积分速度将会降低控制系统的稳定程度,直到最后出现发散振荡过程。因为积分速度愈大,则调节执行的动作愈快,就越容易引起和加剧振荡,同时振荡的频率也越来越高,而最大动态偏差则越来越小,直到最后消除残差。2021/9/3033
⑵比例积分调节的调节规律比例积分调节(PI)综合了比例调节(P)和积分调节(I)两者的优点,利用了比例调节来快速抵消干扰的影响,同时又利用积分调节来消除了调节最终的残差。因此有:2021/9/3034
⑵比例积分调节的调节规律2021/9/3035
⑶比例积分调节器的特点在比例积分调节系统中,在比例部分输出信号的作用下,使调节执行机构的动作在调节过程的初始阶段起较大的作用,但在调节过程结束后可使调节执行机构回复到扰动发生前的位置;由于积分动作带来消除系统残差的同时却降低了原有系统的稳定性,为了保持控制系统原来的衰减率,则在调整比例积分调节器的比例带时必须适当加大。2021/9/3036
(四)比例微分调节(PD调节)⑴微分调节器的调节规律⑵比例微分调节器的调节规律⑶比例微分调节器的特点2021/9/3037
⑴微分调节器的调节规律①输出信号与输人信号成微分关系的调节器称为微分调节器,简称D调节器。其调节规律为:式中,——微分调节器的输出信号;——微分调节器的输入信号;——微分调节器的微分时间常数;——被调参数的变化速度。2021/9/3038
⑴微分调节器的调节规律②微分调节的特点:被调参数的变化速度能反映当时(或稍前一段时间)的被控对象的输入量与输出量之间的不平衡状态,因此,微分调节是按误差的速度调节,而非等到出现较大偏差才开始动作,则调节效果更好。微分调节具有某种程度的预见性,属于“超前校正”。但单独使用微分调节器是不能实际工作的,只能起辅助调节作用。2021/9/3039
⑵比例微分调节的调节规律比例微分调节(PD)综合了比例调节(P)和微分调节(D)两者的优点,利用了比例调节来快速抵消干扰的影响,同时又利用微分调节来抑制被调量的超调。因此有:2021/9/3040
⑶比例微分调节器的特点在比例微分调节系统中,由于微分动作总是力图减小超调,具有提高原有系统的稳定性的作用,因此在调整比例积分调节器的比例带时允许调整得窄一些。当系统处于平衡状态时,PD调节器的输出不为零,故PD调节与P调节相同,都是有差调节。PD调节的动态指标较好,比例带的减小可以减小静差。2021/9/3041
(五)比例积分微分调节(PID调节)⑴比例积分微分调节器的调节规律⑵比例积分微分调节器的特点2021/9/3042
⑴比例积分微分调节的调节规律比例积分微分调节(PID)综合了比例调节(P)、积分调节(I)和微分调节(D)三者的优点,利用了比例调节来快速抵消干扰的影响,利用积分调节来消除了调节最终的残差,同时又利用微分调节来抑制被调量的超调。因此有:2021/9/3043
⑵比例积分微分(PID)调节的特点PID调节具有良好的稳态性能和动态性能:P调节成分使得输出响应快,有利于稳定;I调节成分可以消除静差,改善准确性,但却破坏了动态指标;D调节成分减小超调、缩短调节时间,改善动态性能。三种调节取长补短,使调节质量更为理想。2021/9/3044
⑵比例积分微分(PID)调节的特点在阶跃作用下,各种调节过程的比较2021/9/3045
PID控制器参数对系统性能的影响参数变化响应速度静差超调量振荡调节时间抗干扰稳定性Kp↑↑↓↑↑↑─↓Ti↓─消除↑↑↑─↓Td↑↑─↓─↓敏感↓↑2021/9/3046
3.5控制规律的选择对于一阶惯性对象,如果负荷变化不大,工艺要求不高,可采用比例(P)控制;如果工艺要求较高,采用比例积分(PI)控制;对于一阶惯性加纯滞后对象,如果负荷变化不大,控制要求精度较高,可采用比例积分控制;对于纯滞后时间较大,负荷变化也较大,控制性能要求较高的场合,可采用比例积分微分控制;对于高阶惯性环节加纯滞后对象,负荷变化较大,控制性能要求较高时,应采用串级控制、前馈-反馈、前馈-串级或纯滞后补偿控制。2021/9/3047
3.6PID手动、自动、串级投用原理手动方式:人工直接调节阀位。此时设定值(或称给定)没有实际意义,为保证无扰动切换,可设置设定值自动跟踪测量值。自动方式:投至自动方式为单回路反馈控制,其结构如图4.1所示:控制器控制阀被控对象测量变送图4.1自动方式框图2021/9/3048
本项目对应装置中控制器采用PID控制,即比例、积分、微分控制。基本的PID控制规律为:其中,e(t)=PV-SP,Kc=100/XP。而在实际装置中,采用的是数字控制,为了防止设定值改变时造成的微分无穷大现象,PID控制规律变为:其中,e(t)=PV-SP,Kc=100/XP。2021/9/3049
比例控制是最基本的控制规律,可以迅速的对偏差进行响应;积分作用用于消除纯比例作用产生的余差;微分作用能提高控制器反应的灵敏程度,使系统获得超前作用,可使系统的被控变量提前得到修正,有助于增加系统的稳定性和控制品质。2021/9/3050
串级方式:串级控制系统具有主、副两个控制回路,从信号的传递方式来看,主、副控制器是串联地进行工作,主回路的输出是通过副回路起作用;从回路闭合方向来看,副回路被包括在主回路中,可以看成一个具有精确跟踪能力的控制环节,它以主回路的输出作为自己的输入,并始终跟随其变化而变化,即:主回路为定值控制,副回路为随动控制,这就是串级控制系统的最重要的特征。由于副回路的存在,它包括了原本属于主对象的部分容量滞后和原来落在主回路中的部分干扰,使系统整体放大倍数、静态控制精度、系统抗干扰能力和工作频率都提高到一个新的高度。2021/9/3051
图4.2串级方式框图OPSPPV2021/9/3052
在串级控制系统中,主控制器的输出(OP)值作为副控制器的设定值(SP),投串级的过程中,应该先投副回路、再投主回路。首先将副回路投自动,待副回路稳定后,将副回路由自动(Auto)切换为串级(Remote)模式,再将主控制器设为自动(Auto)模式。在手动向自动投切时,也尽量在设定值(PV)相对稳定时进行,否则将可能在最初的几个周期振荡较大。如图4.3:OPPV不要在这里投自动应该在这里图4.32021/9/3053
在自动状态,如果需要修改设定值,也应当尽可能的在振荡趋于平稳时进行,切忌当PV和SP偏差较大时,为了增加PV向SP变化的速度而将设定值人为地调偏,这样会造成更大的波动。如图4.4:PV不要在这里改设定应该在这里图4.42021/9/3054
控制器的正反作用在PID模块的设置中,包括了控制器正反作用的选择,以保证一条控制回路中控制器、控制阀、对象所组成的系统为一个负反馈系统。对于正作用(InvPID=FALSE),当偏差(ER=PV–SP)增大时,控制器输出按照PID规律减小,反之增大。如果控制器的正反作用选择错误(也就是整个回路没有构成负反馈),则会造成整个控制回路振荡、发散,不能投入自动、只能手工操作。这时需要修改正反作用的设置,并对控制器实现下装。如果DCS不能在线下装,则只能在下次停产检修时进行修改并下装。2021/9/3055
烟雾病的康复护理2012年11月22
参加人员
了解什么是烟雾病烟雾病的病因、发病率烟雾病的临床表现及护理查房目的
病例汇报患者:XX,女,56岁,主因右侧肢体活动不利及言语欠利6月余由轮椅推入病房。诊断:脑梗死恢复期,高血压3级极高危。既往史:烟雾病,蛛网膜下腔出血。对青霉素、丹红过敏。T36.5℃,P76次/分,R18次/分,BP140/90mmHg。右侧上肢体肌力1级,下肢肌力2级。辅助检查:心脏彩超:左房稍大、二尖瓣前叶钙化并少量反流、主动脉瓣少量反流TCD:双侧大脑中、后动脉及左侧大脑前动脉血流速度减慢、双侧椎动脉血流速度明显增快MRI:左侧大脑半球大面积脑梗塞,伴梗塞内出血,脑桥、右侧基底节区及半卵圆中心多发梗塞灶,脑萎缩,颅脑动脉系统显影浅淡。现患者:血压波动在130-146/76-89mmHg之间,右上1级,右下2级,偏侧忽略,言语不清,饮水偶呛。
现存的护理问题1、言语功能障碍2、偏侧忽略3、左侧肢体功能障碍
烟雾病定义病因、发病率临床表现诊断与分型
定义是以双侧颈内动脉末端及大脑前、中动脉起始段慢性进行性狭窄或闭塞为特症,并继发引起特征性的颅底异常血管网形成的脑血管疾病。这种异常血管网在脑血管造影上形似“烟雾”,被称之为“烟雾状血管”,因此称为“烟雾病”
Willis环可以对供应脑组织的动脉进行血液调配,防治脑血液循环的过剩或不足。当组成Willis环的某一动脉或某一部分出现阻塞或者狭窄,可以通过调节其他血管的血流量弥补缺少的部分,保证脑的血流灌注,避免出现缺血的症状,维持脑的营养和机能活动
病因尚不清楚可能与变态反应和颈部各种炎症病变刺激等原因造成长期慢性的血管内膜增生和血管修复的迟缓有关。研究表明患者子女的发病率比正常人高出37倍,虽有家族倾向,但无基因检查证实
发病率发病率最高男性略少于女性,两个发病高峰,的是日本其男女发病率1/1.8分别为5-9岁前次是韩国和后及45-49岁前中国等东南后亚地区
临床表现1、颈内动脉闭塞引起的脑缺血2、代偿扩张的烟雾状血管破裂发生的脑出血3、轻者表现为短暂性脑缺血,头痛、癫痫、肢体无力、感觉异常及视力视野的改变等4、重者则以脑梗塞或脑出血起病而危及生命
Suzuki等对烟雾病的分期。A:第I期,B:第II期,C:第III期,D:第IV期,E:第V期,F:第VI期。Willis环动脉闭塞性病变逐渐加重,颅底烟雾状血管表现为出现、旺盛、衰减、到最后消失及减少的过程。
分型烟雾病临床分型(Matsushima,1990年)临床分型分型标准:Ⅰ型(TIA型)TIA或RIND发作每月≤2次,无神经功能障碍,头颅CT无阳性发现。Ⅱ型(频发TIA型)TIA或RIND发作每月>2次,但无神经功能障碍,头颅CT无阳性发现。Ⅲ型(TIA-脑梗死型)脑缺血频发并后遗神经功能障碍,头颅CT可见低密度梗死灶。Ⅳ型(脑梗死-TIA型)脑梗死起病,以后有TIA或RIND发作,偶然可再次出现脑梗死。Ⅴ型(脑梗死型)脑梗死起病,可反复发生梗死,但无TIA或RIND发作。Ⅵ型(出血型或其他)侧枝烟雾血管破裂出血或者微小动脉瘤破裂出血,以及无法归纳为上述各型者。
诊断发现双侧颈内动脉末端狭窄或闭塞伴有烟雾状血管形成行MRA或DSA检查CT和MRI影像可见脑缺血或脑出血改变
护理措施言语功能障碍:多于患者交流,语速要慢,鼓励发音由简单到复杂循序渐进。
护理措施右侧忽略:1、环境的改变:交谈与护理时尽可能站在患者忽略侧,将患者急需的物体故意放在忽略侧,促使他注意。2、阅读训练:可在忽略侧的极端放上颜色鲜艳的规尺或让其用手摸着书的边缘,用手沿行间移动,以利于引起患者的注意及使视线随手指移动。3、加强患侧感觉输入:利用口语、视觉、冷热刺激拍打、按摩、挤压、擦刷等感觉输入,使患者注意患侧的存在。4、躯干旋转及双手十字交叉活动
护理措施右侧肢体功能障碍被动功能锻炼应缓慢而柔和、有节律,避免做冲动性动作,范围要逐步加大。尽量不引起病人明显的疼痛,常用于肩、肘、腕、手指、髋、膝、踝关节缓慢的伸展和屈曲,肌肉按摩应遵循由轻到重、再由重到轻的原则,手法可采用搓、捏、滚等,每日2次,每次20 min。保持患肢功能位仰卧位时肩部要用合适的枕头垫起来,使肩部略向前伸,把患肢的上肢放在体旁的枕头上,使肘关节和腕关节伸展并略抬高,髋部放一合适的枕头,防止骨盆向后倾斜和两腿外旋,避免下肢伸肌痉挛可用以软枕置于患肢膝下并使膝关节略屈曲,同时应避免被子压在足背上而造成足下垂。主动功能锻炼当患肢的肌力有所恢复时,应积极做主动运动。床上坐立训练,然后再做站立行走,刚开始离床下地行走的病人,应先在他人帮助下练习站立逐渐过渡到自己扶持物体,适应后再做原地踏步,行走时应平稳缓慢,培养正确的步态,纠正八字足,防止身体过于向健侧倾斜。康复训练要持之以恒、循序渐进、劳逸结合。
健康宣教1、保持情绪稳定。鼓励患者树立信心,调动自我能力,建立有规律的生活方式。2、饮食:低盐低脂饮食3、康复训练4、用药护理5、血压监测6、病情观察7、出院指导
护士长总结'
您可能关注的文档
- 最新mm小学信息技术--《复制与粘贴》课件PPT课件.ppt
- 最新MF、UF、NF技术课件PPT.ppt
- 最新MRI产前检查课件PPT.ppt
- 最新New-magic-新魔法-1A-Unit-6-An-Animal-Story-公开课课件课件PPT.ppt
- 最新NMRI原理及创伤临床应用(同济医院放射科-陈浪)课件PPT.ppt
- 最新NOIP普及讲座4-动态规划2课件PPT.ppt
- 最新OSI参考模型课件PPT.ppt
- 最新PEP英语六年级下册第三单元复习课件PPT课件.ppt
- 最新PLC结构与工作原理1课件PPT.ppt
- 最新PLC的关键知识第6章SFC编程课件PPT.ppt
- 最新PLC原理及应用-精品c3资料课件PPT.ppt
- 最新PPT制作技巧(课件)剖析课件PPT.ppt
- 最新ps图层基础知识课件PPT.ppt
- 最新PTCD护理课件PPT.ppt
- 最新QC七大手法培训教程课件PPT.ppt
- 最新Ramp左转车辆先驶过正线跨线构造物课件PPT.ppt
- 最新QHSE体系培训课件PPT课件.ppt