

- 594.50 KB
- 2022-04-29 14:23:47 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'大学物理电磁学静电场对电介质的作用
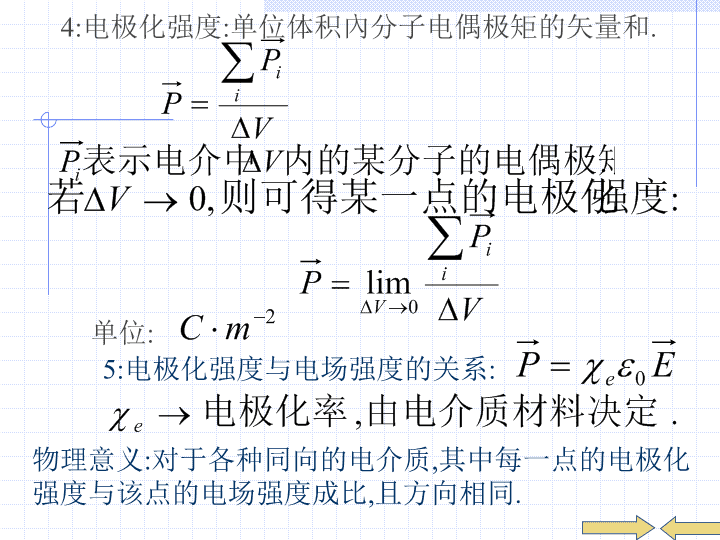
4:电极化强度:单位体积內分子电偶极矩的矢量和.单位:5:电极化强度与电场强度的关系:物理意义:对于各种同向的电介质,其中每一点的电极化强度与该点的电场强度成比,且方向相同.
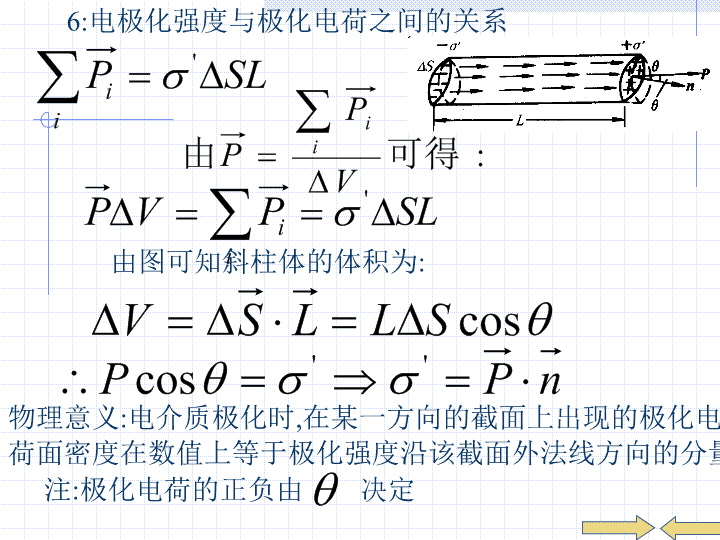
6:电极化强度与极化电荷之间的关系由图可知斜柱体的体积为:物理意义:电介质极化时,在某一方向的截面上出现的极化电荷面密度在数值上等于极化强度沿该截面外法线方向的分量注:极化电荷的正负由决定
取如图所示的高斯定理,由电介质中的高斯定理可得:由这个结果可知,在相同的自由电荷分布下,电介质中的场强与真空中的场强关系为:这是由于极化电荷造成的附加电场削弱了原来的外电场的缘故。
三:电容器细胞电容1:电容器的电容的定义:描述电容器储存电量的能力:注:(2)上式仅为电容的定义式,C的大小由电容器本身决定。2:真空中的平行板电容由于板间可看成均匀电场,故有:
3:电介质中的平行板电容取如图所示的高斯面圆柱体左端处于导体的内部,故有:在圆柱体的侧面上:在圆柱体右端上有:
同理:4:球形电容器的电容:A:若两球壳间为真空,由真空中的高斯定理可得:则两球壳间的电势差为:
B:若两球壳间充满电介质,由介电质中的高斯定理可得:
5:细胞膜电容:球形电介质的电容可应用于细胞体系,其中:6:电介质的电泳细胞电融合电介质电泳:在非均匀电场中,极化后的电偶极子两侧场强不等,极化的电偶极子将高场强区域迂移.
细胞电融合:
课前检测设计一个可以避开障碍物行走的智能机器人。仿真成功后保存成“避障机器人”
观察思考观察这个机器人有什么特征?它能应用在什么地方?
设计可追光的机器人第六课眼睛双腿需要什么感觉器官和行动器官?
阅读P43-P57,你是不是一个设计高手?1、寻光机器人用什么来当成眼睛?它的眼睛由几部分组成?它是怎样工作的?2、编写出寻光机器人程序,并仿真。思考:(1)是用永久循环还是多次循环?为什么?(2)你是如何设置“条件判断”的条件?为什么?(3)你是如何设计寻光机器人走向光源的腿?最重要的设置是什么?(4)在仿真平台上如何设置光源?(6)提出你不明白的问题。第6课课前习
光敏传感器左探头光敏传感器右探头可调电阻光敏传感器只能传给微电脑哪两种电信号?2.6光敏传感器组成与工作原理它的主要作用是判断环境光线的强弱,光源光敏变量=1光敏变量=0光敏传感器的作用
验证你是不是机器人设计高手?2、编写出寻光机器人程序,并仿真。思考:(1)是用永久循环还是多次循环?为什么?(2)你是如何设置“条件判断”的条件?为什么?(3)你是如何让机器人走向光源?设置时要注意什么?(4)在仿真平台上如何设置光源?(6)提出你不明白的问题。
思考如果有多个光源,机器人该怎样行动?当条件判断设置“光敏变量=0”,你的机器人还能寻光吗?
挑战自己?任务:请你为我们居住的小区设计一个智能路灯。(1)描述你设计的机器人的功能。(2)这个机器人应该用什么传感器?(3)你是如何设置“条件判断”的条件?为什么?(4)在仿真平台上如何仿真?'
您可能关注的文档
- 最新大学心理学第五章 思维和想象【课件】课件PPT.ppt
- 最新大学心理学-绪论 课件课件PPT.ppt
- 最新大学物理17振动学习题课件PPT.ppt
- 最新大学物理实验第4章稳压电源与示波器的使用课件PPT.ppt
- 最新大学物理学复习题(第五版)东南大学4792608课件PPT.ppt
- 最新大学物理学复习题(第五版)东南大学费下载课件PPT.ppt
- 最新大学物理刚体转动课件课件PPT.ppt
- 最新大学物理规范作业上册12解答(完整)课件PPT.ppt
- 最新大学物理第3章功和能课件PPT课件.ppt
- 最新大学生人文素质修养-5文化瑰宝-桃花源记课件PPT.ppt
- 最新大学生与心理健康(下)2课件PPT.ppt
- 最新大学物理:第13章光的干涉课件PPT.ppt
- 最新大学物理课件阅读材料库仑简介福州大学李培官课件PPT.ppt
- 最新大学生创业大赛培训教案课件PPT.ppt
- 最新大学生六大基本素质课件PPT.ppt
- 最新大学生常见的心理疾病 课件PPT课件.ppt
- 最新大学生心理健康教育(人际交往)课件PPT.ppt
- 最新大学生心理健康交际心理课件PPT.ppt