

- 1.39 MB
- 2022-04-29 14:23:41 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'5除得尽吗资料
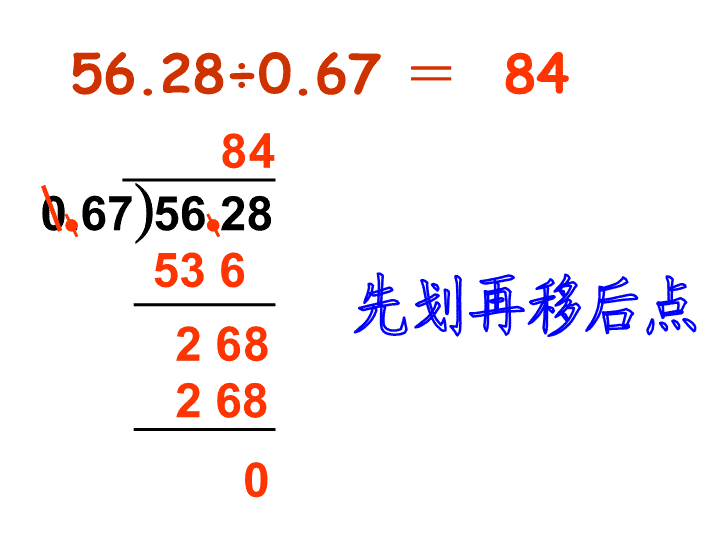
)56.280.674853626826808456.28÷0.67=先划再移后点
北师大版五年级上册第一单元小数除法问题探究练习拓展
先计算,再说一说这些商的特点。28÷18=78.6÷11=1.555…7.14545…
一个数的小数部分,从某一位起,一个数字或者几个数字依次不断重复出现,这样的小数叫做循环小数。28÷18=1.555…78.6÷11=7.14545…循环小数可以写作:1.5.可以写作:7.145..
小数部分的位数是有限的小数,叫做有限小数。有限小数15÷16=0.93751.5÷7=0.2142857142857…无限小数小数部分的位数是无限的小数,叫做无限小数。
课堂练习把循环小数的简便形式改写成一般形式。2.49=,7.518=,42.512=,8.0479=。2.499…7.518518…42.51212…8.0479479…在改写成一般形式的时候,只要把循环节连续重复两次,再添上省略号。练习一练习二练习四练习三
依次不断重复出现的数字是?62438472一个循环小数的小数部分,依次重复出现的数字,叫做循环小数的循环节。3.4666()0.24382438()8.4747()0.44222()…………继续探索
有限小数0.3无限小数小数循环小数3.2121…无限不循环小数3.1415926…
1.算一算,它们的速度分别是每时多少千米?哪些是循环小数?(结果保留两位小数)飞鱼:196÷3=65.33···≈65.33(千米)章鱼:131÷5=26.5(千米)鲨鱼:241÷6=40.166···≈40.17(千米)
2.下面哪些数是循环小数及简便写法?
4.猎豹是动物中的短跑冠军,速度可以达到100千米/时。照这样的速度,它平均每分能奔跑多少千米?(结果保留两位小数)100÷60=1.666···≈1.67(千米)
4、把下面各数填在适当的框里。2.3737…4.682.356432…7.2940.8686864.323.14159…0.094····有限小数无限小数循环小数
(1)一个小数从小数部分的某一位起,一个数字或几个数字重复出现,这样的小数叫循环小数。()(2)9.666是循环小数。()(3)循环小数是无限小数。()(4)3232.32是有限小数,也是循环小数。()
选一选(1)循环小数()无限小数,无限小数()循环小数。A、是B、不是C、不一定是(2)3.223223的循环节是()。A、233B、223C、322ACB…
练习一下面的数中,哪些是循环小数?将它们表示用简便形式表示出来:0.3757…0.417417…1.66666…5.7234242…3.161616…4.37371.1380413804…0.50505…×=0.417=0.6×=3.16×=1.13804=0.50练习一练习二练习四练习三
练习二判断①一个小数从某一位数起,一个或几个数字依次不断重复出现的小数叫做循环小数。()②1.306306…=1.306。()③9.219219…,循环节是921。()④0.666…是循环小数。()×××√练习一练习二练习四练习三
好好加油
1、写一写:你能根据下列循环小数的简便写法,写出它们的一般写法吗?7.307=3.1435=3.1435=2.05=........作业7.518518…8.0479479…==
课前体操使用多次循环设计一个能走8边形区域或走12边形区域的巡逻机器人,并仿真。转角=?能不能让你的巡逻机器人每天巡逻8次呢?对巡逻兵的改进意见
挑战自己你能设计出能巡逻下面区域机器人吗?你是怎么做到的?对巡逻兵的改进意见
第5课设计自动避障机器人
阅读P35-P47,你是不是一个设计高手?1、设计这种的机器人,需要用到哪种传感器?这种传感器由几部分组成?它是怎么工作的?3、编写出避障机器人程序,并仿真。思考:(1)为什么要用永久循环,而不用多次循环?(2)为什么要用“条件判断”?如何设置条件?(3)设置条件“红外避障变量1=0”行不行?(4)把“高速电机”换成“直行”行不行?(5)在仿真平台上如何设置障碍物?(6)提出你不明白的问题。第5课课前习
红外避障传感器的组成红外避障传感器,它的功能主要是识别机器人周围有没有障碍。发射管接收管可调电阻为了让机器人避开前进过程的障碍物红外避障传感器应安装在机器人的哪个地方?障碍物
你是不是一个设计高手?3、编写出避障机器人程序,并仿真。思考:(1)为什么要用永久循环,而不用多次循环?(2)为什么要用“条件判断”?如何设置条件?(3)设置判断条件“红外避障变量1=0”行不行?(4)把“高速电机”换成“直行”行不行?(5)在仿真平台上如何设置障碍物?(6)提出你不明白的问题。机器人要不停的检测有无障碍物,决定是否前行。所以要用永久循环。红外避障变量1=0,无障碍物。红外避障变量1=1,有障碍物。机器人必须根据红外避障变量的值,作出不同的选择。所以要用“条件判断”,并设置好判断的条件。'
您可能关注的文档
- 最新5章医院膳食的种类课件PPT.ppt
- 最新5第一部分-组合体的投影(2)课件PPT.ppt
- 最新5芳酸及其酯类药物分析解析课件PPT.ppt
- 最新5细菌的遗传和变异e课件PPT.ppt
- 最新5课--第3课时--善用法律课件PPT.ppt
- 最新5软骨组织和软骨课件PPT.ppt
- 最新5骨关节疾病的社区康复课件PPT.ppt
- 最新5项目五食品酸度的测定苹果概述课件PPT.ppt
- 最新5非平衡载流子的产生与复合课件PPT.ppt
- 最新6 Sigma BB 培训资料 26 C Continuous data SPC课件PPT.ppt
- 最新6-2多孔材料的合成化学课件PPT.ppt
- 最新6.1平方根第二课时课件课件PPT.ppt
- 最新6.1怎样认识力课件PPT.ppt
- 最新6.2-股票、债券和保险-课件(共21张PPT)课件PPT.ppt
- 最新6.1质量43p课件PPT.ppt
- 最新6.2立方根课件PPT课件.ppt
- 最新6.2博大精深的中华文化课件PPT.ppt
- 最新6.2密度课件PPT.ppt